Robotics is rapidly advancing, with new developments and capabilities emerging every day across multiple sections of this industry. Applications ranging from oil and gas excavations to military and transportation projects rely on underwater robotics to achieve explorative missions, maintenance, and more. Today’s electronic and electrical based robotics systems offer fine-tuned movements, powerful motion, and new subsea capabilities.
At SEPAC, we specialize in designing advanced motion control solutions used in underwater robotic assemblies for research, offshore oil and gas rigs, and more. Our brakes and clutches are essential to rotary and linear actuators that assist in the motion control of robots, including trunk or arm rotation, flexion, extension, and more.
What Is Underwater Robotics?
Underwater robotics is the field of designing, developing, and manufacturing complex robotic systems that operate within a subsea/underwater environment. Popular examples include subsea and subterranean vehicles, remotely operated vehicles (ROVs), autonomous underwater vehicles (AUVs), and unmanned underwater vehicles (UUVs). Well-designed subsea vehicles can reach underwater environments that are too extreme for humans to safely reach.
Many conventional underwater robotics and installations use hydraulic valves and components that were built to withstand extreme pressures and harsh environments. However, today’s advanced robotics are making the switch to clutches, valves, and other components powered by electric motors. Hydraulic components can pose a risk to the system and environment because of a potential propensity to fail, which has happened in catastrophic oil spills near offshore oil rigs. Parts that rely on electrical actuation are not only more reliable, but also offer an additional level of safety. This is better for overall performance and helps protect the environment from future catastrophes.
Subsea Operation Conditions and Requirements
Because subsea environments are so extreme, any equipment built to operate within the ocean’s depths must comply with strict manufacturing and performance standards. By surpassing these standards, SEPAC’s products allow complete subsea robotic systems to operate at different depths, temperatures, and ocean conditions without error.
Common design considerations when manufacturing and designing subsea robotics include:
- The subsurface current profile, which incorporates the force of currents at both the surface and the bottom of the ocean
- The strength of waves, both at the surface and below the surface
- The overall depth the robotic system will need to operate at, which also determines pressure conditions
At SEPAC, we design our brake and clutch solutions to handle these factors. Our designers and engineers consider all factors of functionality so there’s no risk of subpar performance.
Our components are designed to handle low-temperature and high-temperature conditions, including temperatures exceeding 113° F/45° C. When designing solutions for leaders in the subsea robotics industry, common design customizations involve submerging the brake or clutch solution completely in oil. This helps the product to operate efficiently under intense pressure and throughout wet, salty environments. Each oil-filled actuator enclosure is properly pressurized to handle the conditions at any depth.
Subterranean Vehicle Engineering Logistics
One of the most common types of robotic systems is subterranean vehicles. We design and build superior brake solutions that are powerful enough to handle operations in highly pressurized environments at extreme depths, as well as uneven surfaces. The assemblies are also small, allowing for maneuverability in small confines. Our braking systems are built for stopping, holding, and controlling robotic arms, vision movements, tracking tasks, and overall steering.
SEPAC’s most popular solutions include safety power-off spring-engaged brake systems (SEB) and spring-engaged tooth brakes (SETB). Ultra-thin spring-engaged brakes (UTSEB) and thin spring-engaged brakes (TSEB) are commonly used in robotic applications due to their sizes. The SEB, UTSEB and TSEB product types are spring-engaged (power off) and utilize a friction material for torque transmission. The SETB is also a spring-engaged (power off) brake, but utilizes opposing sets of “teeth” to produce torque.
Underwater Robotics Applications
SEPAC brake and clutch solutions are commonly designed for use in underwater robotics systems. Some of the most frequent applications for these underwater assemblies include:
- Oil and gas: Repairing oil systems & assets, maintaining oil rigs
- Research: Collecting biological, chemical, and geological samples for investigation, ocean exploration missions, and water testing
- Search and rescue operations
- Boring offshore tunnels and navigating pipes
- Surveillance of protected areas for hazards and unauthorized entry
- Manage aquaculture projects
- Scanning Seabeds
- Performing Valve Maintenance
Underwater Robotics in Offshore Tunnel Boring
Our robotics systems are built for highly specialized functions, including offshore tunnel boring. Learn more about how our designs power OC Robotics’s JetSnake, a robotics system built to inspect and clean the blades on a machine used for boring tunnels 50 meters below the ocean’s surface.
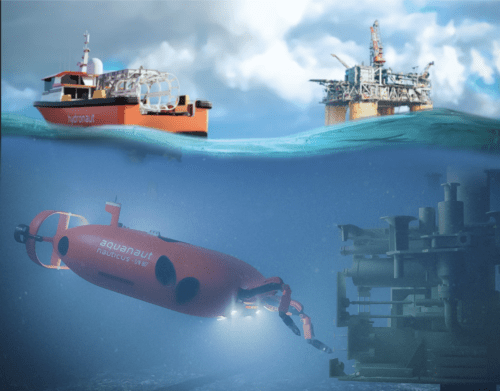 Nauticus’s Aquanaut Program
Nauticus’s Aquanaut Program
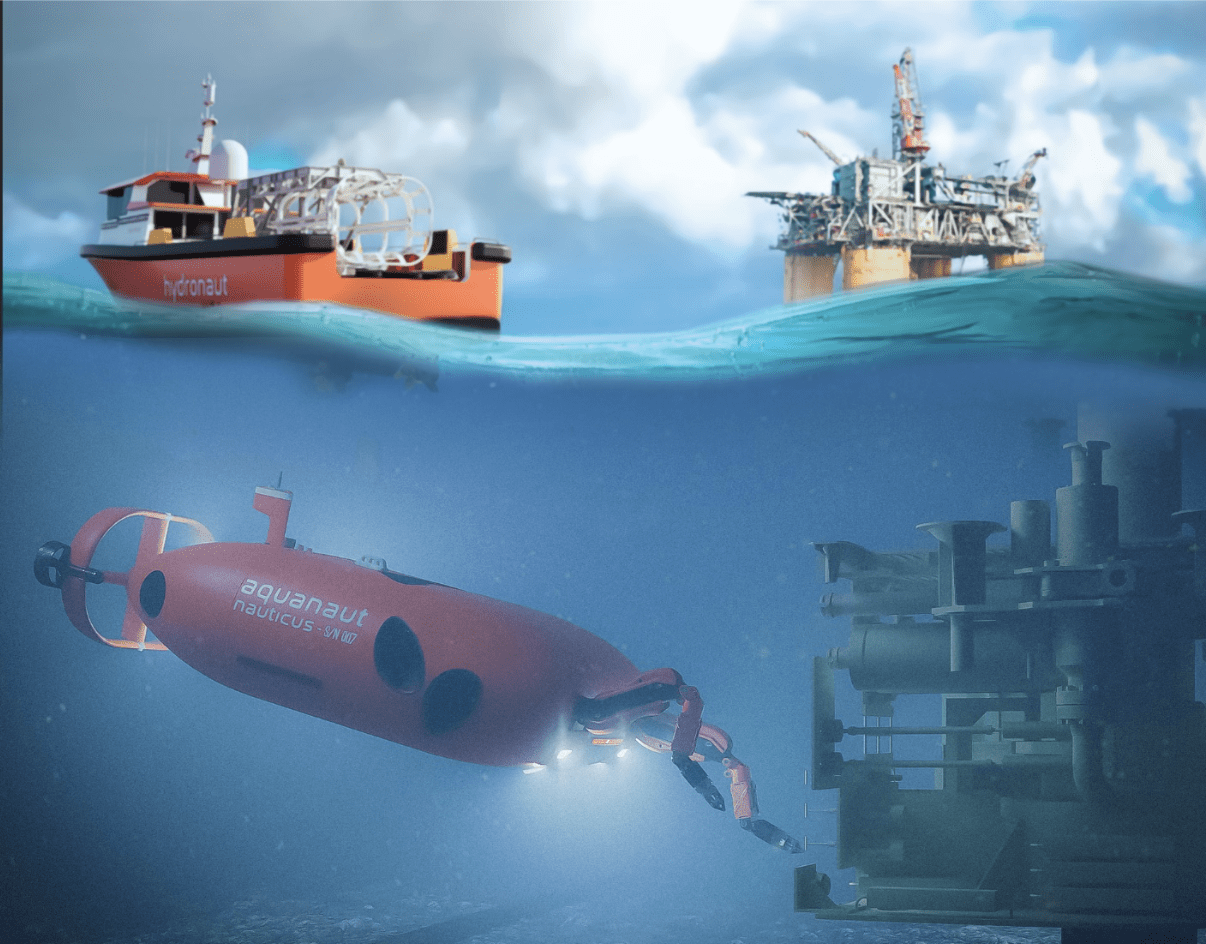
The Subsea Robotics Industry embraces electrification as a means to reduce carbon footprints, ensure environmental safety, and reduce operating costs. Nauticus Robotics, a Houston-based robotics-as-a-service provider is leading the subsea robotics industry toward full electrification with its all-electric subsea technology.
One of their robots, the “Aquanaut” utilizes a work-class all-electric manipulator dubbed the “Olympic Arm”, which matches the power of hydraulic manipulators, all while surpassing them in maneuverability. The combined technology of the Aquanaut with the Olympic Arm delivers improved robotic performance during the repair and maintenance of oil pipelines and subsea systems. Their technology also includes automation which results in increased safety, sustainability, and efficiency. Their supervised autonomy package even includes a haptic feedback system, allowing the user to feel when the Olympic Arm makes contact with an object or reaches the edge of its range of motion. Considering the electrification and automation Nauticus Robotics includes in its technology, it’s easy to see how it earned the Forbes-issued title of “Tesla of the Subsea.”
SEPAC brakes are used in the Olympic Arm to assist with the motion control of the manipulator. More specifically, two types of SEPAC Power Off Brakes are used to “hold” the manipulators in place when power is removed. To account for the need to “hold” the manipulator’s position in more than one axis, both the spring-engaged tooth brake and the dual disc spring-engaged friction brake were recommended to Nauticus Robotics.
Given the subsea environment in which the Aquanaut and Olympic Arm operates, SEPAC engineers had to develop brakes with technology capable of withstanding subsea pressures of over 5000 PSI while also operating through voltage and temperature changes. As a solution, SEPAC engineered brakes fully submerged in pressurized oil, with suitable materials and electrical characteristics to withstand the changes to pressure, temperature, and voltage.
Looking for a customized brake or clutch solution for your application? Discover the best brake technology for your robotics application here. SEPAC is ready to provide expert knowledge to leaders looking to embrace the electrification movement. Contact our team of experts today!
Choose SEPAC for Underwater Robotics Solutions
At SEPAC, we’re devoted to creating innovative designs for all-electric robotic parts, actuators, clutch and brake solutions, and more. Contact us today to learn more about our capabilities or request a quote to start your order.